
Von der Idee zum Projekt
Hier können Sie anhand von Bildern und Videos unseren Fortschritt mitverfolgen oder sich über den aktuellen Stand unseres Projektes informieren.

Recherche
Zu Beginn des Projekts erfolgte eine umfassende Recherche, die sowohl Internetquellen als auch den Austausch mit Fachkundigen umfasste. Auf dieser Grundlage fiel die Wahl auf ein Arduino-gestütztes System. Um mögliche Fehler frühzeitig zu identifizieren und die Umsetzbarkeit des Projekts zu überprüfen, wurde die erste Testphase eingeleitet.
Testphase I
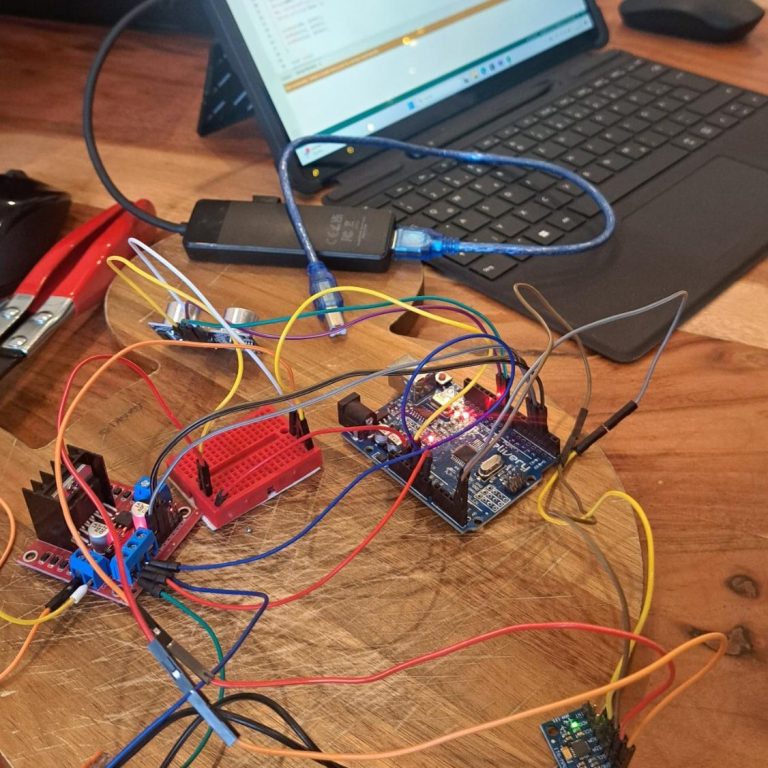
Zunächst wurden verschiedene Sensoren (HC-SR04, MPU-6050), ein Arduino Uno sowie eine kompatible Steuerung (FS-i6X) beschafft. Anschließend erfolgte eine Überprüfung der Komponenten und ihrer Programmierung, um ihre Eignung für den vorgesehenen Einsatz zu bewerten. Die Motoren und die dazugehörigen Treiber wurden in dieser Phase noch nicht verwendet.
Testphase II
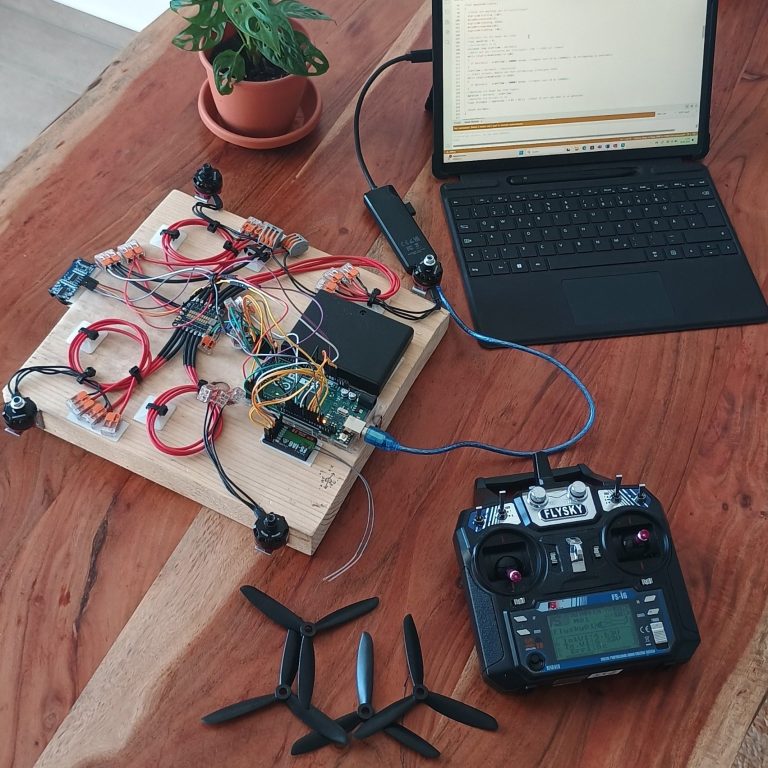
Um das Programm und die Funktionen der Drohne im „Trockenlauf“ zu testen, wurden alle Komponenten auf einem Holzbrett befestigt. Dadurch ließen sich Anforderungen wie das Neigen, Kippen und der automatische Höhenausgleich besser simulieren und überprüfen, ob die Programmierung korrekt funktioniert.
Testphase III
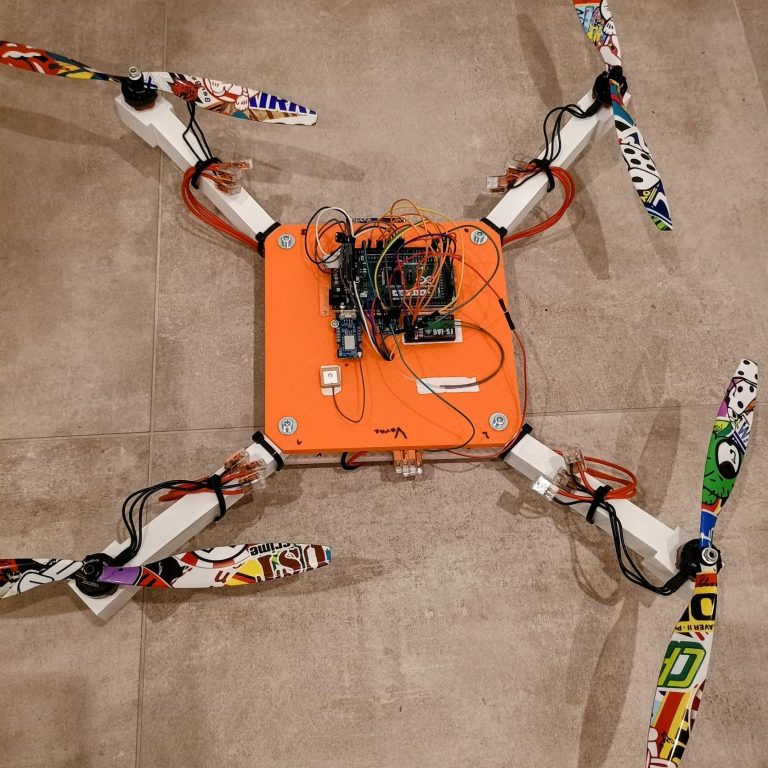
Da der „Trockenlauf“ bisher reibungslos verlief, konnte in dieser Phase der Fokus auf die Konstruktion und Weiterentwicklung des Designs der Drohne gelegt werden. Nach dem Zusammenbau der einzelnen Komponenten können nun die ersten Flugtests durchgeführt werden. Diese Tests sind entscheidend für die Feinabstimmung der Steuerung und die Optimierung des Designs.

Testphase III
Die Flugtests wurden erweitert, indem die Drohne zunächst an einer Schnur befestigt und in der Luft aufgehängt wurde, um die Regelparameter für den Flug besser einstellen zu können (Öse am Deckel). Nach den ersten Flugtests und einigen unvermeidlichen, jedoch notwendigen Bruchlandungen konnten die auftretenden Probleme besser identifiziert und angepasst werden. Auf dem Bild sind daher provisorische Füße und Sicherungen aus Klebeband zu erkennen. Zudem wurde die Entscheidung getroffen, andere Propeller zu verwenden. Nachdem die Parameter, zunächst grob eingestellt waren, konnte die Drohne im Freien getestet werden.

Testphase III
Für aktuelle Videos der Flugtests besuchen Sie gerne unseren Instagram - Account.

Testphase IV
Durch die ersten Flugtests, sowohl an der Schnur als auch im Freiflug, konnten die aufgetretenen Probleme noch klarer definiert und eingegrenzt werden. Die angebrachten Füße ermöglichen ein stabileres Starten und Landen, was die Handhabung erleichtert. Das Programm wurde so optimiert, dass die Reaktionszeit um das 20-Fache verbessert werden konnte, wodurch die Drohne deutlich schneller auf äußere Einflüsse reagiert. Diese Verbesserungen haben die Durchführung stabilerer Flugtests ermöglicht. Es ist zwar noch notwendig, einige Parameter weiter anzupassen, aber der Fortschritt ist deutlich erkennbar.

Testphase IV
Für aktuelle Videos der Flugtests besuchen Sie gerne unseren Instagram - Account.

Testphase V
Das Projekt wurde erfolgreich für die Technikerbörse vorbereitet und ist nun komplett fertiggestellt. Im Zuge der Weiterentwicklung wurden neue 800KV-Motoren sowie 12x5-Zoll-Propeller verbaut. Da diese Kombination bislang noch nicht mit konkreten Werten getestet wurde, sind weitere Flugtests erforderlich. Erste Versuche zeigen jedoch, dass die grundlegende Funktionalität gegeben ist. Des weiteren wurde eine Kamera und ein GPS-Modul verbaut und in das bestehende System integriert. Die bisherigen Optimierungen ermöglichen eine stabilere Steuerung, sodass gezielte Anpassungen der Parameter vorgenommen werden können. Damit ist eine solide Basis für die abschließenden Tests geschaffen, um die Leistungsfähigkeit der neuen Komponenten weiter zu validieren.

© Copyright. Alle Rechte vorbehalten.
Wir benötigen Ihre Zustimmung zum Laden der Übersetzungen
Wir nutzen einen Drittanbieter-Service, um den Inhalt der Website zu übersetzen, der möglicherweise Daten über Ihre Aktivitäten sammelt. Bitte überprüfen Sie die Details in der Datenschutzerklärung und akzeptieren Sie den Dienst, um die Übersetzungen zu sehen.